単純適応制御系の制御周期短縮による性能向上 豊橋技術科学大学 機械工学系 システム工学研究室 教授 内山 直樹 氏 |  |
豊橋技術科学大学 内山先生の研究室にて、MATLAB/SimulinkベースのRCPコントローラ 「DT-0008 高速コントローラ」を研究にご活用頂きましたので、インタビューをさせて頂きました。
先生のご研究内容についておしえてください。
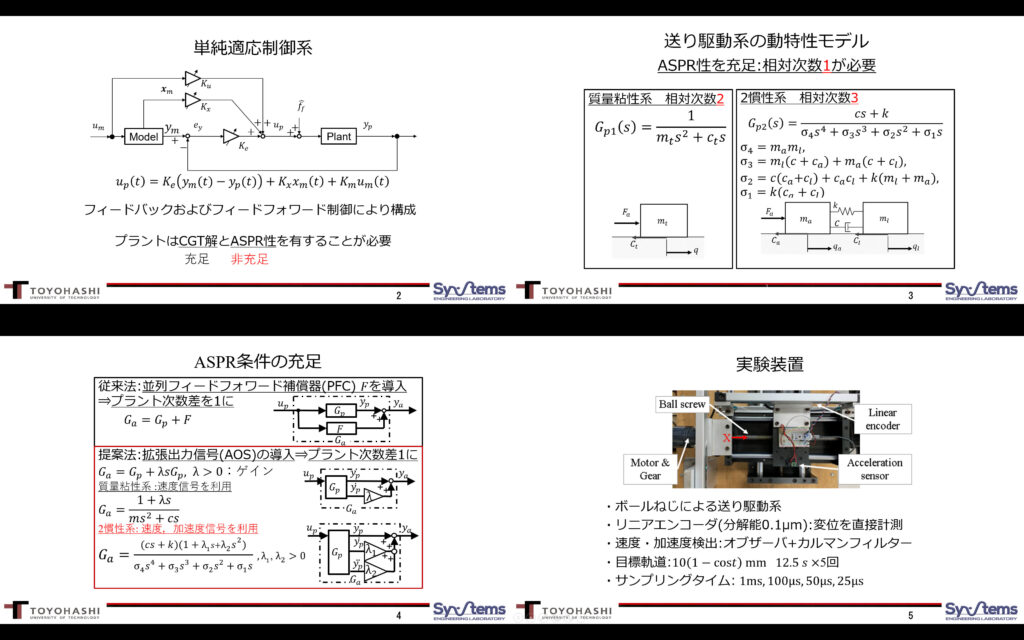
送り駆動系は産業機械の様々な部分に使用されており,これらの高精度化や省エネルギーが求められてきました。しかし,実環境では振動やノイズ,特性変化の影響があり固定のPIDコントローラでは高精度化が難しいと考えます。
そのため,適応制御を用いて高精度化を目指しています。
今回、この適応制御を行うコントローラの高速化のため、高速RCP、DT-0008 高速コントローラを研究にご活用頂きました。
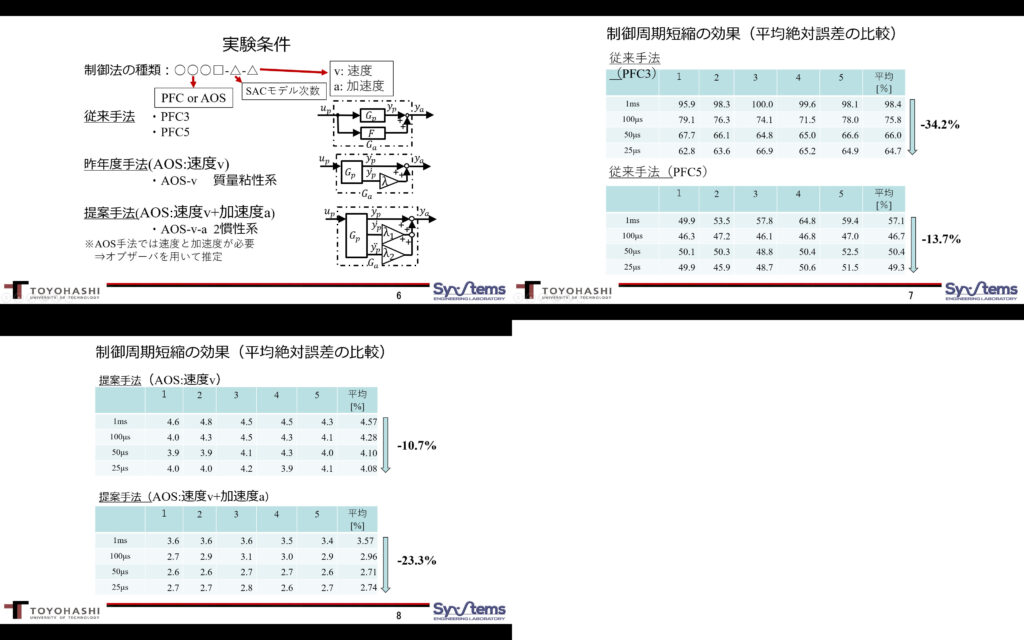
適応制御のアルゴリズムをDT-0008に実装し実験を行った結果、以下のようにサンプリングタイム変更による誤差の削減が実現できました。
本システムを導入する以前はどのような課題がありましたか?
以前使用していた制御器はLinuxベースのもので、動作周波数は5~10kHzくらいでした。
演算が高速化できれば精度があがるのではないかと想定していましたが、検証できるコントローラがありませんでした。
今回DT-0008を使用して高速化することで、精度が向上することが実証できました。
DT-0008が研究開発の効率化に貢献したところはありますか?
研究室ではMATLABを使用しているため、そのままコントローラに実装できるところです。
以前はLinux OSのマイコンに実装していたため、学生がソフトウェアのプログラミングなどを習得するのに時間がかかっていました。
DT-0008を将来的にどのように研究に活用していきたいですか?
他のプロジェクトにも活用していきたいと思います。
カメラ(画像入力)やbluetoothのインタフェースが搭載できるのであれば画像処理やSLAMなのどアプリケーションでも使用してみたいと思っています。
ご要望頂いた機能につきましては今後実装を進めていきたいと思います。
豊橋技術科学大学 内山先生、インタビューにご協力頂き誠にありがとうございました。